AMAZON multi-meters discounts AMAZON oscilloscope discounts
Perhaps the most fascinating part of radio and electronic control is that pertaining to robots. Robots--the mechanical men of science fiction and reality, human-like in appearance, with strength beyond imagination, whose electronic brains arc magic marvels of wizardry; they would do our bidding constantly and tirelessly, performing all those innumerable routine, delicate and difficult tasks we dread so much.
The robot age It has been said that the years 1920-1930 could have been called the Robot Age ("The Robots Arc With Us," Arco Press). In 1932 it was reported that a man by the name of Schaffer designed and constructed a robot which could hammer nails, clean windows, forge iron, saw tree trunks and pile up boards. As it turned out, so the report goes, something went wrong with this robot one day. It suddenly picked up a large piece of metal and demolished its master's workshop as well as its master. This robot was said to have been operated by radio signals and had compressed air actuators. Who knows? Could it have received an interfering signal or was that signal purposely sent?
It was also in the 1930's that the Brainard robot was created. It is interesting to note that this machine was built by a boy just 14 years of age.
Figs. 801 and 802 show Westinghouse's Elektro and Sparko. Elektro can walk, talk, smoke, sing and play the piano. He can identify red and green colors, bow and turn his head 45° in either direction. His companion, Sparko, weighing 85 pounds and having within his metal skin two electric motors, can walk, sit up, bark and wag his tail.
Here is a robot which responds to spoken commands. A microphone...
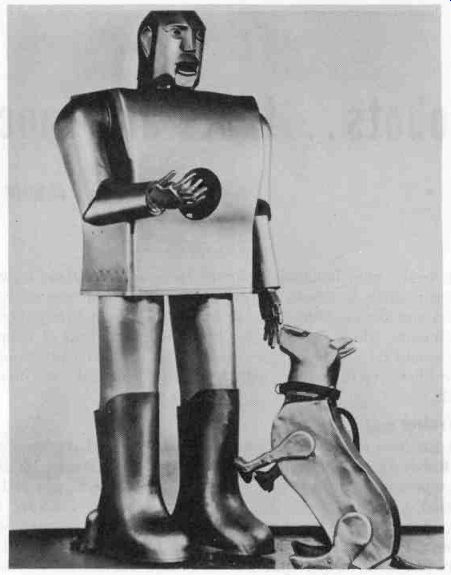
Fig. 801-a.
A pair of robots
...picks up the sound, converting it into electrical impulses which operate the relays in his 75-pound brain. The words, of course, must be the correct ones, in a correct sequence, and properly spaced.
Televox and Garco
Then there was the Swiss robot, Televox, which operated through photoelectric cells and which in 1946 crushed its maker as he was...
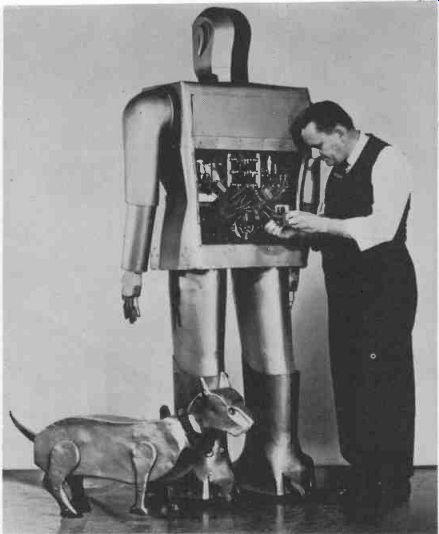
Fig.
801-b. The robot dog is called Sparko. Elektro is his robot master. [Westinghouse]
...attempting to make an adjustment on it. (So much for the historical report.)
In more recent years there have been other, perhaps even more spectacular, robots. There is the report of Garco (Popular Science, 1953) who was constructed by an aircraft engineer. This robot was capable of sawing, hammering, drilling, mixing chemicals, picking up papers, stacking boxes, soldering. He could also roll his eyes and play chess. His joints were operated by Wheatstone bridge balances and each arm had five motors; three for torque at ball joints in shoulder and elbow and the others to operate rods which, like tendons, gave a linear push and pull.
Fig. 802. Elektro takes a few minutes out for a smoke. [Westinghouse] Mobots
And finally, under man-type robots, is the report (1960) of the Hughes Aircraft Company's Mobots. These were developed to perform serious tasks in very unusual environments such as high radiation areas. It is in the Mobots that we find an application of tele vision eyes as well as the use of arms and hands. Mobots operate by means of electrical impulses sent to them through cables and can operate by means of these same signals transmitted over radio waves.
Relay Moe
There have, of course, been many other types of robots constructed which, although they do not have human form, do possess a kind of intelligence. One of these was the game-playing robot, Relay Moe, reported in Radio Electronics Magazine in December 1956, and woe to the opponent who would challenge this electronic marvel.
Robot tractor
There was the robot tractor (Electronic News, 1959) which was tested in England. This device, operating from signals received from a cable buried underground was expected to plow, cultivate and seed farm lands entirely automatically. In essence, this robot was similar to robot automobiles being tested in the United States.
The concept of control of the robot tractor, or automobile is interesting. A cable, buried a few inches below the surface of the earth, is energized with a low-voltage, high-current tone between 60 and ...
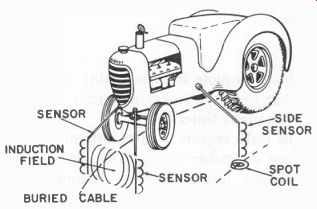
Fig. 803. Robot tractor plows field without attention.
... 1,000 cycles per second. The vehicle has two coil-type (inductive) sensors so positioned that when the vehicle is directly over the cable, the induction field encountered is of equal strength for the two coils.
For a simplified system each coil operates a relay, one for steering left, one for steering right. As long as the vehicle is exactly centered over the cable, both relays receive the same magnitude of signal. In another method perhaps the two signals would balance out in a bridge circuit and there would be no steering signals. Let the vehicle get off center, though, and the bridge signals are unbalanced so that one relay will operate to steer in one direction that re-centers the sensors.
Such operations as starting, stopping, applying brakes, and actuating the hydraulic lift are signaled through a second cable placed alongside the steering cable. This one has its own coils set at designated points along the route. Another sensor out to one side of the moving vehicle passes over these spot coils. Should it pick up a signal, circuits to initiate various other operations can be energized. Fig. 803 illustrates this idea.
The deadliest of robots, the Homing Guided Missile, has but one mission in life and that is to seek out its prey, intercept and destroy it.
Once launched, it is on its own, responding to its own sensors. Un aided and unassisted by external control systems, it accomplishes its mission.
And so, with the Space Age upon us, with satellites orbiting the earth and the sun ( and soon the moon and other planets), with man himself about to take that step across space, following the robots sent ahead to test the eternal void between worlds, what better way to make our hobbies of radio and remote control keep step than to build a robot or two ourselves? Why have robots? The greatest value of robots is their ability to take over routine, monotonous tasks that are performed in exactly the same way every time and must be done many times a day.
Some monotonous tasks require a large amount of physical power which we humans are incapable of supplying. In this category would be the moving of objects, lifting, hauling, digging, etc. A robot can also do precision work that requires exact duplication of an object over and over again tirelessly. There would be no variation in performance as the hours of operation pile up. Some jobs require a day-and-night effort and must go on regardless of weather, time, etc. The robot would not be affected by these conditions and would continue tirelessly until the job is finished, whether it takes a day, week or a month.
Most important would be those tasks which must be performed in unusual environments like extreme heat or cold, in extreme wetness ( as on the ocean floor), or in a vacuum as in space. There are radiation hazards, poisonous atmospheres, and other conditions affecting human life.
Types of robots
The robot is actually a unique type of machine which can be categorized according to ability and intelligence.
The programmed robot is not very smart. It can do certain things but only what we have programmed or built into it. A good example is the washing machine. This machine robot will wash clothes exactly in the same way every time. It washes, rinses, dries and stops. You can put fairly clean or extremely dirty clothes into it and it will wash both in just the same manner. It does its job in an orderly, methodical manner.
A second category is the receptive type robot. This one will respond to commands as to how to do the job. However, like the first, it is still quite stupid, not having a mind of its own. We have to watch it constantly and guide it in all its operations.
The response to environment is a third type. This robot performs certain actions depending upon what conditions it runs into. For example, suppose we wanted to make a robot cat or dog. Primarily we might want it to scoot around the room steering itself and creating general pandemonium until we physically turn it off.
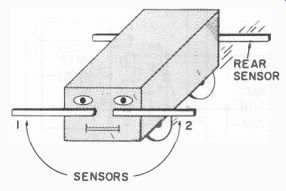
Fig. 804. Response to environment robot.
The designing of such a robot (Fig. 804) would not be difficult since the only requirement is that it must steer itself. If we provide it with a drive motor and wheels and start it out on a straight line (the environment for it is the living room), it will run into the wall, furniture or people.
It must have sensors or transducers--devices to tell it when it has hit something to make it do something, like back up, turn and start out in a new direction. Of course we must consider how far we want it to back up--it might back into something else.
Let's put this idea into circuitry (Fig. 805 ). Assume that we have a little car-type object. The body or cover, a dog, a cat or gremlin, can be made up later to suit our fancy. It must have a drive motor and a steering motor. The steering motor must be capable of automatically neutralizing itself so it will normally steer straight ahead.
It must have two front (or forward) sensors (1 and 2) as it is necessary for the robot to know whether to turn right or left when it hits an object. When the robot strikes an object, sensor 1 (a wire) closes the circuit between Battery 1 and the two contacts X and Y.
When Y is closed it energizes relay RY1 so that the polarity of Battery 2 to the drive motor is reversed. This makes the robot back up. At the same time contact X is closed and this causes RY3 to energize, turning the front wheels in such a direction that the robot backs out and away from the object in front of it. Large value capacitors are used across the relay coils. These are necessary to keep the robot moving and steering when its sensor breaks contact with the object it has hit. After a short time, determined by the sizes of capacitors C1, C2, and C3, all relays de-energize and the robot tries to go straight again.
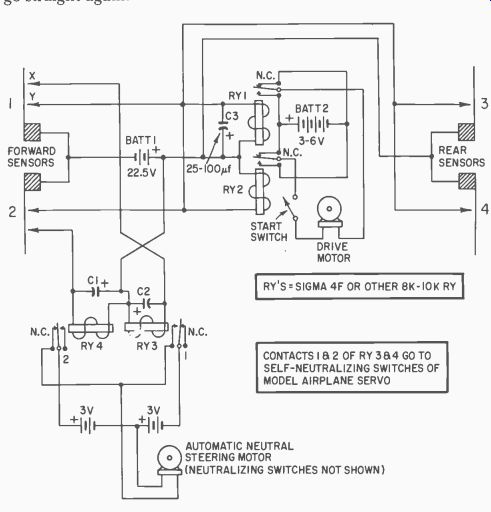
Fig. 805. Circuit of environment responsive robot.
The rear sensors (3 and 4) are provided in case the robot gets into a corner and in reversing backs into an object or wall. Note that the rear sensors put a short circuit across the reversing relays (RY1 and RY2) so that the instant they close their contacts, the capacitor (C3) is discharged and the reversing relays must de-energize and the robot goes forward again.
One could add to the robot's effect on people by providing it with lights for eyes which would glow when in motion and, with a little imagination, one could cause it to move its head, etc.
So much for the fun part. How can this robot be put to use? Note that this kind of robot, in time, would cover every part of the room we released it in. Suppose we constructed it around a vacuum cleaner and redesigned the sensors so that when it hit a far wall they would cause the robot to turn slightly and then continue in reverse until it hit the near wall. This would be one sure way to interest the feminine members of the household in robots--build them a robot vacuum cleaner.
The thinking robot is in the highest intelligence category. Let us examine the human senses to see how a robot could be equipped to be as nearly human as possible.
A human has eyes. With these he can determine distance, sizes of objects, number of objects, color, type of object, direction and motion.
A human has ears. With these he can sense the direction from which a sound comes. By comparison with his memory (and in relation to other senses) he can determine distance, motion and identify what is making the sound.
A human has a sense of touch. With the fingers, as well as other body surfaces, he can determine smoothness, roughness, heat, cold, size, shape, motion (if the object touched moves), nearness of objects to his body.
A human has a smell sensor. With this be can determine location (remember the popcorn stand?) and identification--food, perfume, etc.
And a human has a brain.
Eyes for a robot might be provided by a pulsed ultrasonic system (like sonar) which, acting like radar, would provide intelligence concerning objects and motion. It could not provide information concerning color. Imagine a robot moving along a level path which abruptly terminates in steps. The pulsed echo return from its sensors would indicate when the walk became steps, the height of each step and how many.
Ears could be duplicated by microphones and be made to function much as the human ears do. By triangulation on the sounds, just the head or the whole robot could be made to turn until it faced the source of a sound exactly.
Duplicating the sense of touch is more difficult. One possible device might use capacitance effects. The sensor would be connected to an oscillator and the frequency of the oscillator would change as the sensor (hand) came close to objects. Actual feel is more difficult.
This might be accomplished through additional sensors and feedback circuits in the hands and fingers which would tell the brain when they had grasped something, how much pressure was being exerted, whether the object was remaining rigid or was deforming under pressure. Heat, cold, etc. could be detected by sensitive transducers ...
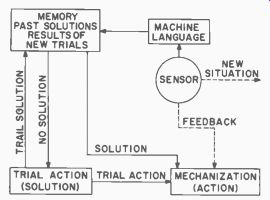
Fig.
806. Thinking robot brain. 1. Sensor determines situation. 2. Machine language
block converts information to pulses. 3. Memory records situation, hunts for
solution. 4. If solution is present, memory sends command to Mechanization.
5. If no solution, Memory routes situation to Trial Action. 6. Trial Action
unit determines an action based on "best guess". 7.
Trial Action recorded by Memory. If successful, no further trials. If not successful,
Trial Action unit tries another solution. Memories may be magnetic drums, tapes,
magnetic cores, etc.
...made as an integral part of the hand. Smoothness and roughness of an object or surface could be measured by vibration-type detectors which would be activated to a lesser or greater degree as the fingers would pass over the surface.
For the smell sensor, there are machines which give an output ac cording to odors and which were developed by the Chemical Corps for gas detection.
Thus, it seems within the range of feasibility to give the thinking robot many of the senses that humans have. The degree to which this can be accomplished would depend on the degree of instrumentation possible within the robot.
The robot brain
The basic brain of the thinking robot is illustrated in Fig. 806. Note that it implies sensors of various types, a language conversion unit which would change the sensor information (pulses, tones, etc.) into a language or signals that the brain proper could understand. The memory unit would store all the past experiences, all the possible solutions to all possible combinations of sensor signals. The trial action part of the brain will help the robot think out unusual or extraordinary situations. Finally, there is the mechanization unit which causes the robot to speak, move its arms, turn its head, or whatever is appropriate. There must be external as well as internal feedback for the mechanization system.
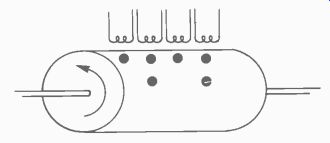
Fig. 807. Memory unit is a magnetic drum. Dots indicate stored information
picked up by coils as drum rotates.
For an example as to how the brain would function, let us assume that our robot is moving down the walk. It is able to detect the edges of the walk, walls, etc. As these signals appear in the sensor output they are converted into impulses which are passed on to the memory unit. Assume that this memory unit is a magnetic drum (Fig. 807) which records these impulses according to which sensor the signals originate from or that there is a magnetic drum for each sensor.
Imagine that suddenly someone casts a sack over the robot so it can no longer see where it is going. The immediate loss of eye information causes the eye-sensor memory drum to spin, searching for a condition that matches this loss of signal condition. If there is a com parison in the memory, the circuits comparing the input signals from the sensor to the signals from the memory cause another signal which would be sent to the mechanization unit along the solution-action line.
In this case, the solution action might be one or several commands or signals in sequence to cause these to happen: Stop! Raise arm, brush hand across face.
Finding a solution
If, however, there is no repeatable solution in the memory, the memory sends the problem down to the trial action unit. This unit will select a solution on the basis of how well the memory and input signals match. If they are very close, then the trial action unit might sign a stop motion command and then perhaps a turn. As the robot turns, signals again whip through the memory and comparison circuits go down to the trial action and if this was a solution, there would again be signals from the eye sensors. If this is not a solution and there is still no signal from the eye sensors, the trial action unit signals this information back to the memory for storage. The memory must store not only successful solutions but also solutions which were not effective.
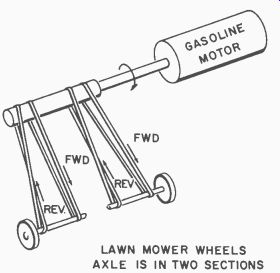
Fig. 808. Obtaining forward and re verse motion from a unidirectional motor.
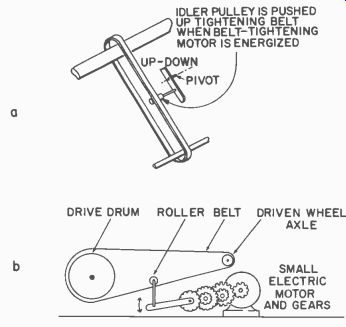
Fig. 809. Belt tightening roller [a] and side view of belt tightener [b].
Now that the trial action unit has determined that the problem is not a condition of direction, it might effect a test of circuit operation, an automatic internal check, so to speak, of the operation of the sensors, holding the robot motionless while it does so. Finding these all right, it causes another series of tests and test actions until finally, by trial and error, it arrives at the correct solution of having the robot rub its hand upward over its face to remove the cover.
The human mind works in much the same way. We base our actions on experience and we store our successes and failures in our memory units. We also effect trial solutions in everything we do and learn, providing our memory with information, as a result. Machines can do the same thing by using computers as brains. This would be the thinking robot, a machine which could analyze situations and have near-human sensors, memory and trial-action reasoning elements.
Building robots
The receptive robot most nearly fits into our command-control category. Let us consider building a robot lawn mower. To evaluate the job it is to do: It must be able to start, stop, go forward and reverse, turn left and turn right. Six commands will be needed; this might mean six control channels.
Usually we do not have to send any commands simultaneously, except possibly the forward (or reverse) movement and the steering.
Here we could start the machine going forward (or reverse) and then steer it. To refine it, we might want to do both at the same time.
How do we accomplish steering? The mower will most likely be driven by a small gasoline engine which will run all the time; there-fore we would want our control system to disengage clutches to one wheel or the other so that our turning would be accomplished in the same manner as one steers a tractor.
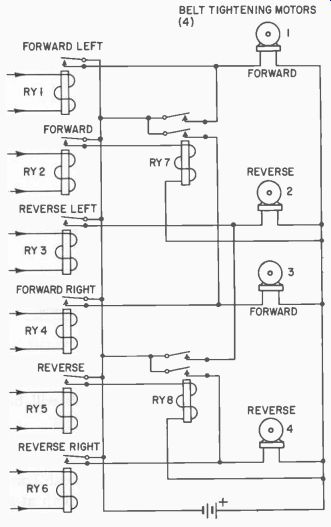
Fig. 810. Robot lawn-mower wiring diagram.
We cannot actually reverse the drive engine, so that our reversing action must be accomplished by engaging gears or clutches which will cause the mower to reverse even though the drive motor always turns in the same direction. This then would also indicate that starting and stopping would involve disengaging the clutches completely.
Fig. 808 shows a basic method of obtaining forward and reverse rotation of the drive wheels, individually, from a gasoline engine which runs in one direction. The concept is simple, consisting only of having two belt drives to each wheel. One belt is not twisted, the other has one twist in it. This twist causes the reverse rotation. As far as obtaining the drive is concerned, small rollers on each belt (Fig. 809) which would tighten that belt when the command is given, would do the job. Four such rollers would be required and in the off position all would be loose. The relay wiring to the small electric motor which would tighten the belts should be wired according to Fig. 810 so ...
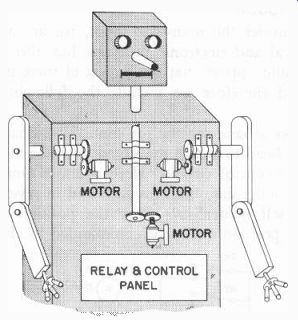
Fig. 811. Man-type robot arm and head drive.
... that when the first command is given, both forward-drive belts are tightened. When the command for steering left is sent, only one forward belt is engaged and for right steering the other forward belt is engaged. To steer while moving in reverse, each of the reverse belts must be engaged separately.
In the schematic (Fig. 810) eight relays and four small electric motors are shown which, when energized, cause the individual belts to tighten. When RY1 is energized alone, motor 1 pulls its pulley until the belt is tight. It then stops its rotation because it has opened its own limit switch. When the signal stops and RY1 opens, motor 1 will loosen its belt due to its own self-neutralizing action. Note that these little electric motors are nothing more than self-neutralizing model airplane servo motors. Thus RY1, when energized, would cause the mower to go forward but turn left.
To turn right, RY4 would be energized and exactly the same actions would take place for motor 3 and the mower would turn right. When RY2 is energized, it in turn energizes RY7 which energizes both motors 1 and 3, tightening both forward-drive belts. Thus the mower would go straight forward.
Energizing RY5 causes both reverse-drive belts to be tightened. Reverse steering would be similar to forward steering.
The man-type robot
When we consider the man-type robot, we are again faced with not only electrical and electronic problems but also with mechanical problems. It would appear that the largest of these is the mechanical construction and therefore we include the following for a starting point.
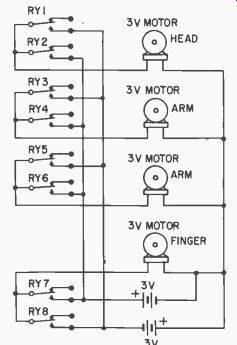
Fig. 812. Method of connecting motors to relays. Relays are activated by reed
decoders.
Fig. 811 shows a basic scheme for connecting small electric motors to the arms and head to obtain movement of these members. Fig. 812 shows the motor-control circuits. Here again it would be necessary to make each motor rotate both forward and in reverse. These drives should not be self neutralizing since the positioned member must often remain in position until it is commanded to change. The three motors would then require six control channels. Each motor would have to have limit switches to prevent over-travel of the primary members.
We should be able to control the elbow joint. This, too, must contain a small electric motor that will cause the forearm to raise or lower (Fig. 813). Since we have one motor for each forearm and each motor must be capable of being driven in either forward or reverse direction (up or down) this requires at least four more channels.
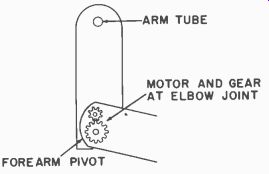
Fig. 813. Elbow joint movement is obtained by motors and gears. Wires from
the elbow, wrist and hand go up through the arm and into the body through the
arm tube.
Now we come to the wrist and finger. Only one finger is shown but this can be expanded to more fingers if desired. As shown in Fig. 814, the wrist-drive motor is limited to 45° rotation in either direction, ...
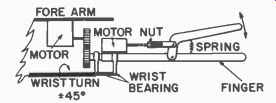
Fig. 814. Wrist and finger detail.
... which is enough for the wrist motion. Another motor is connected through a linkage to the finger. When this motor runs in one direction the finger is opened, pulling against the spring pressure. When the motor runs in the opposite direction, its lead screw nut moves away letting the finger close again due to the spring pressure. Two more bidirectional motors are required for each hand. This means eight more control channels are needed.
Finally, there is the motion of the robot. Fig. 815 shows how the leg might be pivoted in the body and the little drive motors placed in the shoe which is hinged to the leg so that it can always remain parallel to the floor. The walking process might be accomplished by energizing a little device inside the robot which would cause one leg drive motor to run first, then the other, automatically (Fig. 816).
Each would operate for just the correct interval of time to give good forward motion. Note that the pivot must be above the center of gravity of the body, otherwise some kind of body stabilization, such as a gyroscope, would be needed to keep it erect. One might consider a lady robot as a simpler approach for then, because of a long dress down to the floor or near it, it would not need to have legs as such.
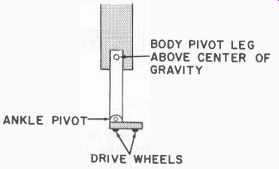
Fig. 815. Robot moves by drive motor and wheels in "loot."
It is a real challenge to the experimenter and builder to construct such a robot or mechanical man. Not only would he be getting a real education in the concepts of automation and control but he would also have the fun as well as the satisfaction of being able to make it operate. To steer a robot and make it pick up objects and do useful things constitutes a far greater challenge in control systems than do the usual boats, cars and airplanes.
We have suggested basic construction methods and indicated the minimum number of control functions required. Undoubtedly some one will come up with ideas of his own and devise a control system which might be a great deal simpler and require far less channels than we have indicated. It's a challenge--give it some thought ! Robots which respond to spoken commands When we consider how to make a robot respond to the spoken word we can think back to a model airplane control system which would cause the elevator to move up at the word "up" and down at the word "down" and to neutral at the word "neutral." This is really a system which produces the illusion of having the airplane respond to the spoken word. Actually (using a microphone input to an audio amplifier which, in turn, activates a relay), the system works the model control system much in the same manner that present radio control systems activate a relay and escapement when a tone is received.
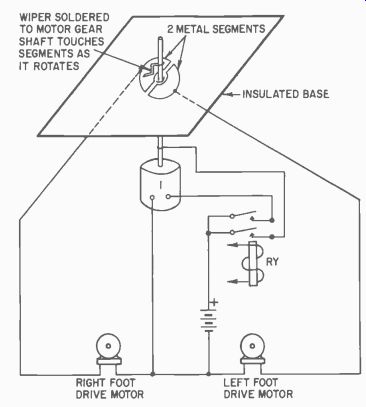
Fig.
816. Automatic walking programmer. When the relay is energized, motor 1 runs,
turning the wiper [through a gear train]. As the wiper touches metal segments,
each "foot" motor is caused to run in sequence and for
the same length of time. The relay is energized when the command to walk is
transmitted. This command is one reed tone.
All three operations are performed in sequence and all that is required to activate the system is a sound--any sound that can be picked up by the microphone. If we chose to say the word "up", which was done in this case, the sound causes, the first operation--up elevator. We always have to follow this with the word "down" since that word would be the next operation performed; then, of course, we next have to follow this with the command for neutral. This is a system that might be used for parlor tricks with friends, cautioning them first that absolute quiet must be maintained while the robot is operating. Otherwise the robot will not be receptive to the spoken word. We leave it to your imagination to visualize any other exploitation of this idea.
Actually, there is a large amount of scientific research being carried on to characterize human speech sounds and to determine different characteristics which identify them and which could be used to effect control operations. One useful end product of this idea would be a robot stenographer which would consist essentially of a typewriter connected to a decoding machine. The device would type out the page in response to human-voice dictation.
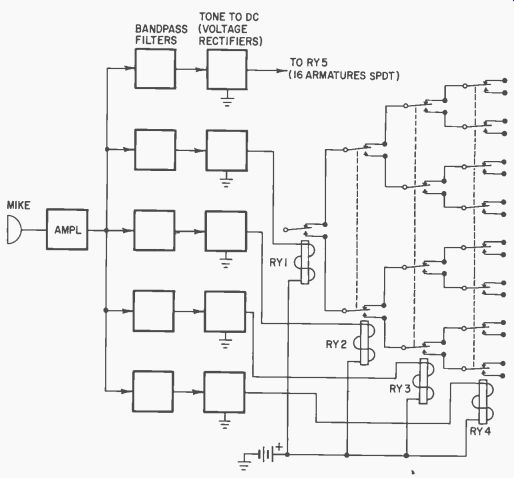
Fig. 817. Details of voice-control system. Five filters give 25 [32] functions.
Because human words (syllables, etc.) do have different characteristics it is possible to take words which are predominant in sound differences and feed them into a selective decoder and then to a small computer, causing operations such as those performed by Elektro.
Combinations of high-pass, low-pass and band-pass filters selecting the amplitude and magnitude of the various tones in the word structure can result in a particular mechanical operation. For example, the word "this" has a sibilant sound which is somewhat prolonged.
The word "stop" is short without sibilance. So the tonal characteristics (frequencies) and the way they are combined to form word sounds, then length of the sound, etc., all contribute to the method by which we, as humans, recognize and interpret the human vocabulary. As machine intelligence increases there is no reason why it cannot be given this same ability in a mechanical sense.
Consider the feasibility of multi-syllable words where each syllable, when spoken carefully, results in the same kind of coded command as a pulse command. Cig-ar-ette, for example, has three syllables which can be spoken within a precise time interval. Each syllable has certain frequency characteristics which make it different from an other three-syllable word, such as re-treating. Two-syllable words differ in the same way; for example, playing and begin. So when we recognize that for syllables or words spoken closely together each syllable or word represents different frequencies or groups of frequencies, one can readily see how a multitude of specific commands could be created.
Fig. 817 shows how the basic electronics of such a system might be laid out. The microphone picks up the sounds, the band-pass filters separate these into their various frequencies from which the rectifiers produce dc currents which cause the control relays to operate in such combinations that the desired movements are produced.
Robot brains
Earlier we discussed the general operation of the thinking robot's brain and gained some idea as to how it might operate. The brain of a robot is perhaps the least understood of all its parts. Is a robot brain a computer, and if so, just how does it operate to cause the robot to perform all the various things we want it to? Sometimes, to answer these questions we get books explaining the operation of computers and then try to apply our study to an understanding of the operation of a robot brain. Sometimes we just get more confused.
The brain of a robot may be thought of as a computer but in an other sense we may find it is not a computer at all. If we analyze just what this part of a robot does, we will find that a very large function performed is simply comparing the information, received from various sensors, to other information which may come from sensors or a storage unit. This comparison, simply the combining of signals of different polarities or phases, produces a third signal, which, in turn, causes something to happen.
Let us develop this concept further. Suppose the robot has two photoelectric cells for its eyes and the 'brain section' is a circuit which will compare the inputs from each photocell. It is not difficult to imagine if one cell receives a flash of light while the other does not, that the resulting signal ( which might come from a bridge circuit) would have, say, a negative polarity. This type of signal would be passed on to an amplifier which makes a little motor run. The motor would operate, possibly counterclockwise. When this happens, the robot would turn to the left quickly. We say quickly, because the signal would be large as it is the full output of one photocell.
Following the same line of reasoning, if there were a flash of light which illuminated both 'eyes' (photocells) but illuminated one a little more than the other, the comparison circuit would produce a difference signal whose polarity would correspond to the signal from the cell with the larger illumination. The result would be a weaker signal to the electric motor-because now the output of one cell subtracts from the other. Thus the robot would turn more slowly. Note, how ever, that it would turn until the inputs cancelled.
This idea can be applied to sound, radar-type pulses, light, heat, odors, pressures, or other physical phenomena which can be recognized by electronic or physical sensing devices. This idea of a comparison circuit, then, is one of the fundamental circuits of a robot brain.
Programmed action circuit
Now consider a second type of circuit which is important. This is the 'programmed' action circuit-a type which will make various things happen once it is activated. These actions will be performed in sequence and will continue unless some other signal is received which either changes the 'program' or causes this programmed operation to stop.
Such a circuit might be a simple automatic stepping relay which, once started, clicks around contact by contact in accordance with some predetermined stepping time interval. Each of the contacts that it clicks through would cause other circuits to be energized-perhaps just for a moment, perhaps long enough to start sub-programming routines. And, as these other circuits start operating or the sub-programming routine start working, this, in turn, might produce new input signals which would have an effect on the main programming relay. They might cause it to stop, reverse, move faster or slower as the information might demand. You can see that this kind of circuit is responsible for most of the robot's actions. It actually becomes the robot's 'nervous system'.
Let us explore this idea further. Suppose you want a robot arm to move around a table top. This arm is to be equipped with a claw or fingers to grasp small objects, such as small blocks. You want the arm to locate these small blocks anywhere on the table top, identify them, pick them up and put them into a taller box which might also be on the table. Also, you want the arm to locate the tall box and determine if it is filled with blocks or whether it is empty. You might say that this arm would have to have a brain-a computer-to be able to perform these tasks.
Certainly the first requirement is that the arm must be able to sweep back and forth across the table top. It must also move forward from the back edge to the front edge. We will assume that the arm is to be located at the middle of the table and therefore as it sweeps back and forth, its length must increase as it swings out toward the edge of the table to maintain contact with the table top. With a little thought we can imagine an electronic circuit which will cause a little motor to run back and forth-back and forth-to cause the side movement.
We could also imagine a second motor positioned so that it would cause the arm to move forward a few inches after every sideways sweep. We can further imagine a set of contacts, attached to the hand, which are held in the 'open' position by the pressure of the arm on the table. As the arm swings to the right, say, and as the angle from the vertical increases, the hand would tend to rise above the table top. This would cause these contacts to close, and they in turn would cause a third motor to run, lengthening the arm until the pressure of the table top again opened these contacts. Thus we have two 'programs' and a direct command sensing circuit. When no blocks are on the table, the arm will sweep back and forth and move from the back to the front of the table, and will maintain contact with the table top. One more thing here-if the arm goes off the table top, the pressure contacts lengthening the arm will close, this motor would run and the arm grow longer and longer. We must provide 'limit' switches* on the arm length to stop everything if this happens.
Now we come to object identification. Let us provide the 'claw' with contact switches, one located on each side. As the arm sweeps, if it should come in contact with a block on the table, one of these 'side sensors' would be closed. When this happens the side sensor produces a signal which stops the 'sweeping' program and causes another program to start immediately. This second program would be the running of a small motor which causes the arm to raise, or get shorter. Now, here is a key concept. If the arm raises just a small amount before the side sensor opens its contacts, additional contacts located on the arm, held closed only during a short upward movement, would cause the arm to position over, say two inches, in the direction that the block was located. It would have identified the block because the side contact of the claw opened during a given upward movement of the arm. This, in turn, causes the subroutine [See Gernsback Library No. 74-Model Control by Radio ] programs to go into effect giving first, the two-inch movement over the block; second, a downward movement back to the table top, sensed by the claw's bottom contact, then a closing of the claw to grasp the block, and once contacts inside the claw are closed due to the grasping of the block, still another program is activated making the arm raise, move to a predetermined position over the large box and then releasing the small block.
The identification of the large box would be made because the claw `side-sensor' would remain closed during a longer upward travel of the robot arm. When this box is identified in this manner, a subprogram would simply make the arm move over a given amount, come back down on the table and continue sweeping and searching for small blocks as before.
This, then, is an idea of the operation of a robot brain where the robot responds to a general command, but it, itself, determines its actions by what it finds on the table and where it finds them.
As you see, we have input sensor commands which in a sense are modifying a programmed operation by causing different predetermined programs to be set into operation. Consider these concepts carefully and you'll be surprised at how lifelike your robot can become, as well as challenging in concept and construction.